Prosthetic Control
To be able to replicate the physiolocial behavior, it needs to be quantified first. We have developed a model-based approach to estimate knee stiffness from common gait lab data. We have validated this approach in perturbation experiments in isometric conditions.
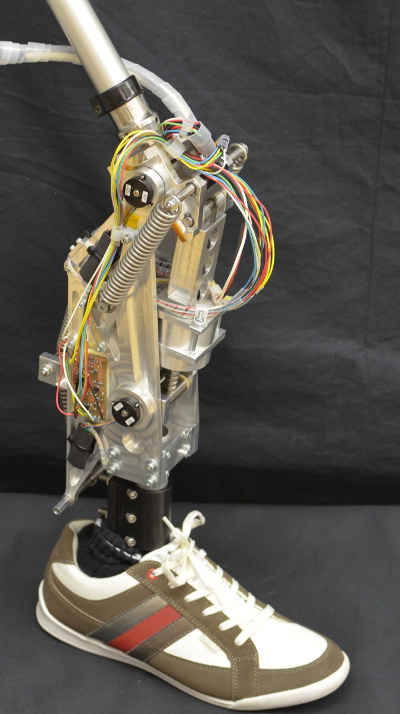
We are currently working on implementing this physiological behavior in a controller for our experimental prototype.
Publications
S. Pfeifer, A. Pagel, R. Riener and H. Vallery.
external page Actuator With Angle-Dependent Elasticity for Biomimetic Transfemoral Prostheses
IEEE/ASME transactions on mechatronics, Vol 20 (3), pp.1384-1394, 2015
S. Pfeifer, H. Vallery, M. Hardegger, R. Riener and E.J. Perreault.
external page Model-Based Estimation of Knee Stiffness
IEEE Transactions on Biomedical Engineering, Vol 59 (9), pp. 2604-2612, 2012
H. Vallery, R. Burgkart, C. Hartmann, J. Mitternacht, R. Riener, M. Buss
Complementary limb motion estimation for the control of active knee prostheses
Biomedizinische Technik/Biomedical Engineering 2011 56:1 , 45-51
S. Pfeifer, M. Hardegger, H. Vallery, R. List, M. Foresti, R. Riener and E.J. Perreault.
Model-Based Estimation of Active Knee Stiffness
Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR), 2011
S. Pfeifer, O. Caldiran, H. Vallery, R. Riener, A. Hernandez Arieta
Displaying Centre of Pressure Location by Electrotactile Stimulation Using Phantom Sensation
10th Vienna International Workshop on Functional Electrical Stimulation and 15th IFESS Annual Conference, Vienna, Austria, 08 September 2010 - 12 September 2010, 71-73
Funding
The Swiss National Science Foundation through the external page National Centre of Competence in Research (NCCR) Robotics
The external page Gottfried and Julia Bangerter-Rhyner Stiftung
The ETH research grant ETHIIRA (ETH Independent Investigators' Research Awards)