ChARMin
ChARMin
Children with neurological disorders (e.g. cerebral palsy) often show an impairment of their arm motor function, affecting their independence and participation in daily life. Intensive rehabilitation training with active participation is important to trigger neuroplasticity in order to recover and learn motor functions. We developed a pediatric version of the ARMin rehabilitation robot, called the children ARMin (ChARMin). ChARMin was made for children aged 5 to 18 years. The wide size ranges within this age group and the heterogeneity within the neurological disorders resulted in challenging requirements for the design of the new robot, for instance a high level of adjustability, increased safety for children, reduced joint friction and a high backdrivability.
Involved People
- Urs Keller
- Dr. med. Verena Klamroth-Marganska
Collaborators
- Kinder-Reha Schweiz
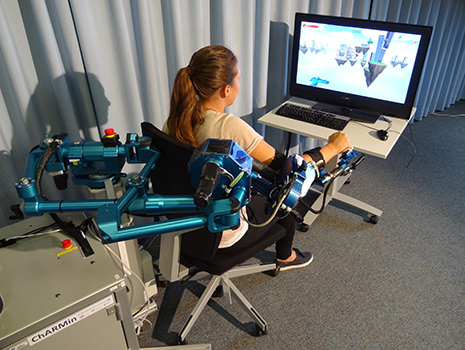
New control approaches help supporting arm movements in space. When a clear target is defined in the virtual scenario, the arm can be supported with an assist-as-needed path control along a predefined trajectory. However, for exercises where no clear target is available (e.g. painting or playing the piano) a new online learning approach has been established to learn a force field in the whole workspace and to support the end-effector in order to allow the child to voluntarily move the arm.
Motivation is crucial in order to provoke an active participation during the therapy session. Therefore, we developed new game-like scenarios to motivate children when training with the robot.Combined with the patient-cooperative control strategies, we created a motivating environment assisting children as needed and fostering longer training with more repetitions.