Mixed Robotic Strategies
Robotic guidance is used to reduce performance errors while training motor tasks. However, research on motor learning has emphasized that errors drive motor adaptation. Thereby, robotic algorithms that augment movement errors have been proposed. Previous results suggest that haptic guidance enhances the learning of timing components of motor tasks, whereas error amplification is better for learning the spatial components. We aim to study the effect of employing different controllers in parallel that reduce or augment errors based on the timing and spatial characteristics of the task to be learned.
Many typical tasks account for time and spatial characteristics. For example, learning to draw a circle with a particular speed profile is a motor task with a timing component (learning the speed profile), but also with a relevant spatial component (drawing a circle). In order to enhance learning of both, timing and spatial task characteristics, we designed a novel mixed guidance controller that combines haptic guidance and error amplification. We hypothesize that providing haptic guidance to learn the time components– i.e. reducing errors tangential to the desired trajectory– and error augmentation to learn the spatial components – i.e. augmenting normal errors – would result in better learning of timing and spatial characteristics.
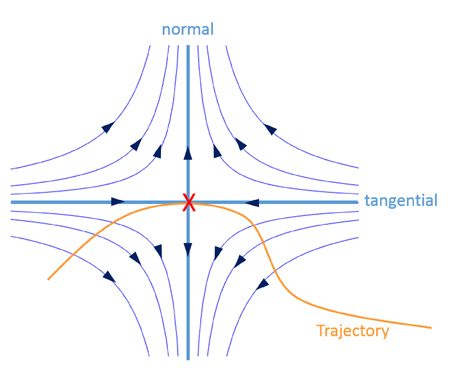
The mixed guidance controller is realized by a saddle-point force field, which is linked to the desired position and is, therefore, time-dependent (Fig. 1). The force field has a stable manifold tangential to the trajectory, which acts as a haptic guidance controller, guiding the subjects in velocity related aspects. The unstable manifold perpendicular to the trajectory acts as an error augmentation controller.
We also developed a guidance-as-needed controller on end-effector coordinates that guides the movement by a force that is reduced based on the ongoing subject’s absolute tracking error, using an adaptive algorithm.
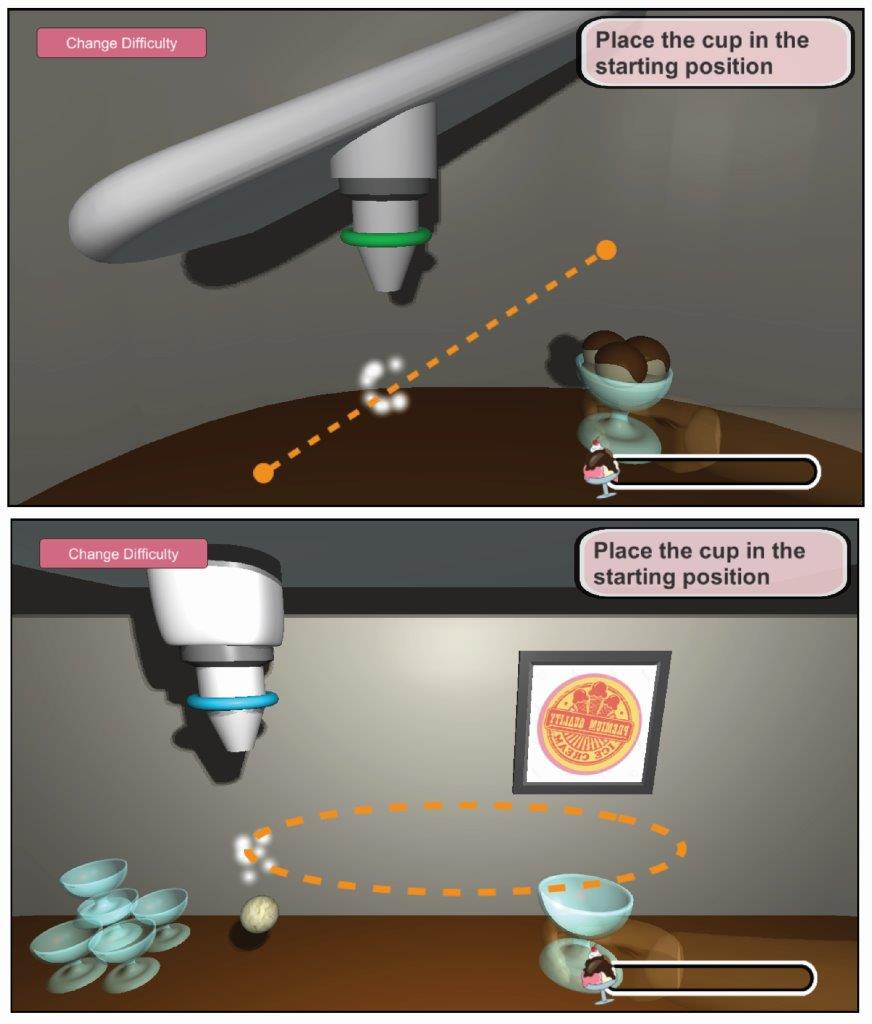
In order to test our controllers, we developed a virtual game using Unity. The aim of the game is to create ice creams by placing a cup under distributors that followed predefined trajectories. Two distributors move following two different trajectories:
Continuous rhythmic trajectory: the ice cream distributor follows a circle on the horizontal plane with an ellipsoid speed profile (Fig. 2).
Continuous single trajectory: the toppings distributor moved along the line of proprioceptive neuromuscular facilitation, i.e. a line that spans 50 cm from the bottom left to the upper right in 3D, with a speed profile with three different peak speeds (Fig. 1).
We are also interested in studying whether error amplification benefits human feedback motor control (e.g. when learning to track a figure), or feedforward motor control (e.g. prepare to perform a reaching task). Therefore, we also aim to study the effect of error amplification when learning to perform tasks that require mostly feedback or feedforward motor commands using the robotic exoskeleton ARMin.
Publications
L. Marchal-Crespo, external pageP. Wolf, external pageN. Gerig, external pageG. Rauter, external pageL. Jaeger,external pageH. Vallery, external pageR. Riener "The role of skill level and motor task characteristics on the effectiveness of robotic training: first results," Rehabilitation Robotics (ICORR), 2015 IEEE International Conference on, Singapore, 2015, pp. 151–156.
Funding
- Swiss National Science Foundation (SNF) through the grant number PMPDP2_151319
- National Centre of Competence in Research (NCCR) Robotics.